
SPS60E DC Electric stabilizer actuator
Call 954-577-2850 or Send Enquiry for Pricing
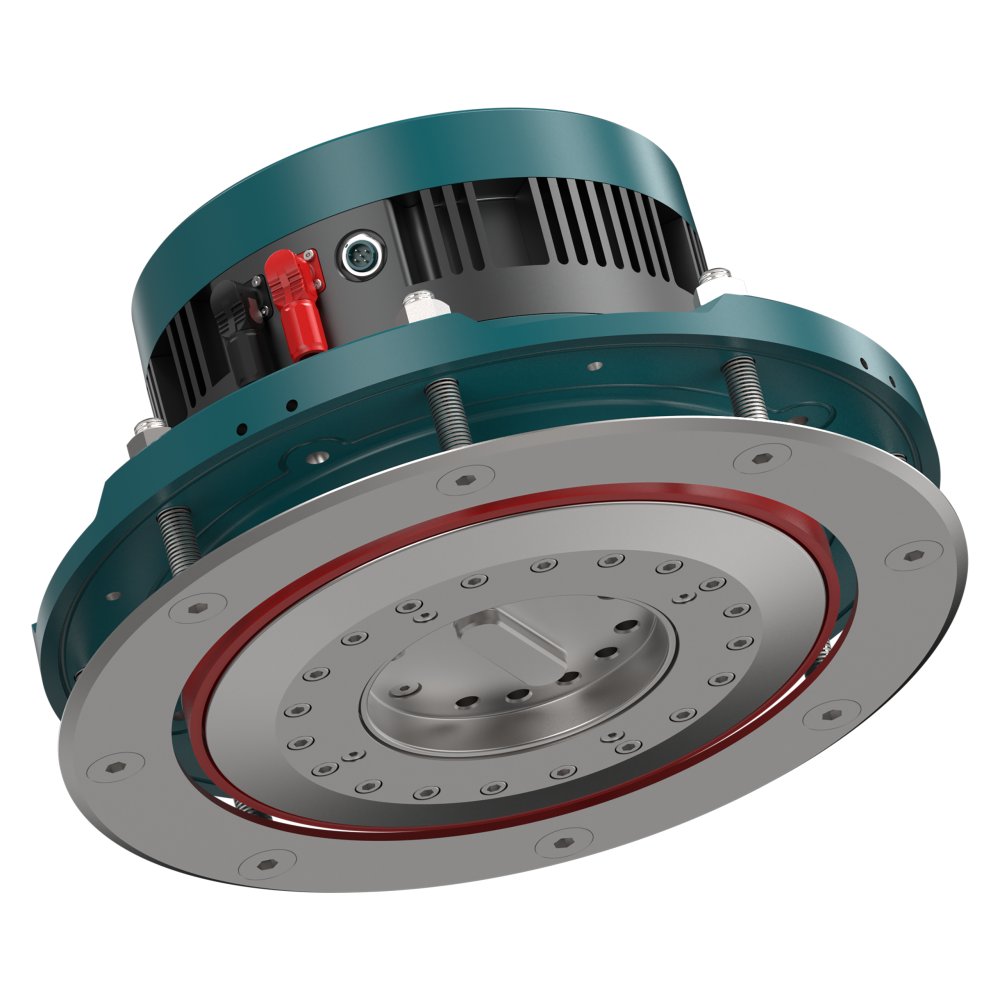
The SPS60E actuator is the powerhouse behind Sleipner’s Vector Fins™ on yachts in the 19–24 meter range. Combining unmatched compactness with energy efficiency, it is easy to install and seamlessly integrates with yacht systems. The SPS60E controls fin movement precisely, minimizing roll and enhancing onboard comfort.
Powered by 24V or 48V DC, it continuously adapts fin positioning in real-time, ensuring optimal stabilization for mid-size yachts seeking powerful performance with minimal space requirements.
Product Description
ANY SPEED
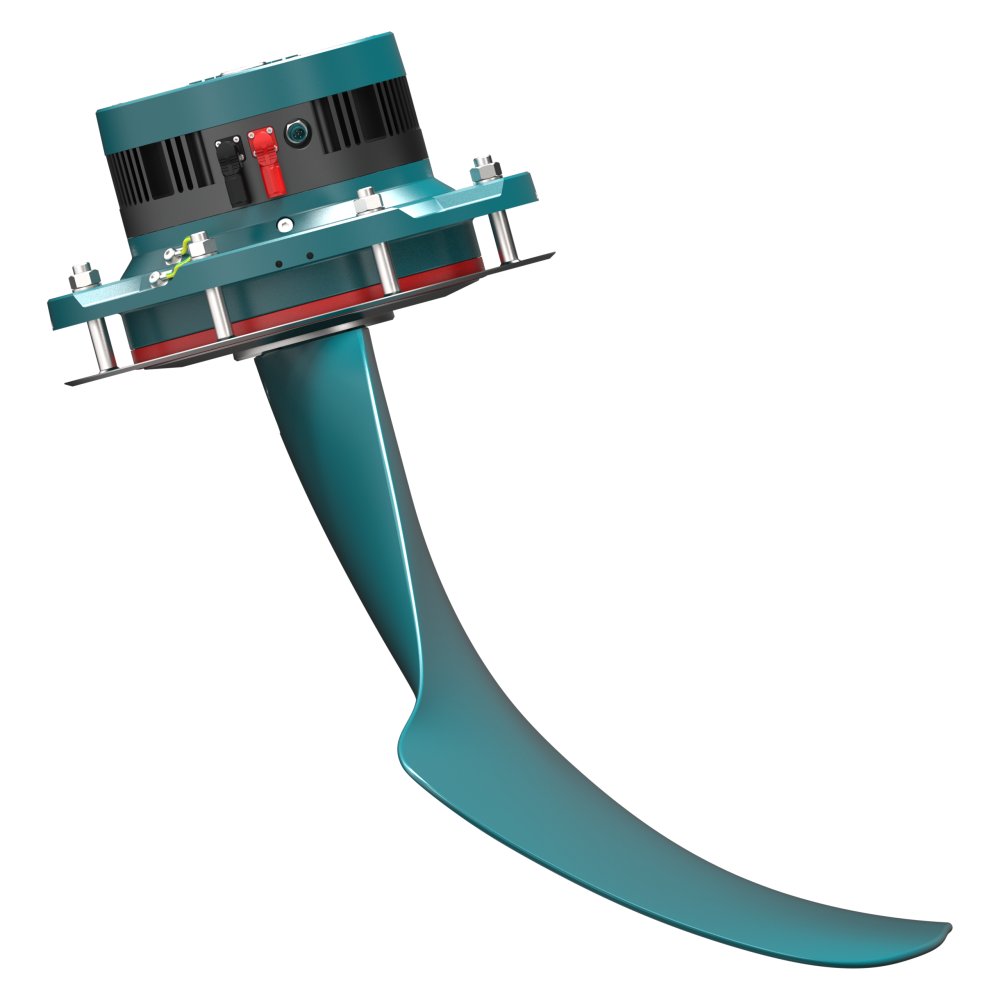
Vector Fins™ is the only top-performing stabilizer system for both cruising and at anchor use. The fins’ concave shape creates multilateral force direction improving the stationary positioning of a vessel while at anchor. The uniqueness of the design also becomes evident while underway as it improves in effectiveness as speed increases. Sea trials have proven that Vector Fins™ are up to 50% more efficient at anchor and capable of reducing the uncomfortable rolling motions of the vessel by up to 95% while cruising.
360° INSTALLATION
Designed to fit in small and challenging installation areas, the Vector Fins™ unique cone shaft design allows you to utilize the space onboard to install the actuators in any direction and insert the fins into the position you require.
| Category | Feature / Specification | Value |
|---|---|---|
| Power | Power Supply | 24V DC, 48V DC |
| Protection | IP Rating | IP67 |
| Performance | Peak Power per Actuator | 5.5 kW |
| Integration | Typical Vessel Size (4-fin) | 30-40m / 98-131ft |
| Typical Vessel Size (2-fin) | 19-24m / 62-78ft | |
| Typical Vessel Class | Motor boat, Commercial vessel | |
| Features | 360° Installation | Yes |
| Any Speed | Yes | |
| Patented Noise Reduction | Yes | |
| Industry Leading Efficiency | Yes | |
| Plug and Play Signal Cables | Yes | |
| 4-fin Configuration Available | Yes | |
| Dynamic Position Mode | Yes | |
| Eco Mode | Yes | |
| Dock Mode | Yes | |
| On Water Service Possible | Yes | |
| Instant On | Yes | |
| Coordinated Turn Control | Yes |
| Fin Model | Roll Time (s) | Max (100% effort) kW | Med/Big (66% effort) kW | Small/Med (33% effort) kW |
|---|---|---|---|---|
| V4-12HS | 3.0 | 2.11 | 1.00 | 0.24 |
| 3.5 | 2.05 | 1.05 | 0.24 | |
| 4.0 | 1.87 | 1.09 | 0.25 | |
| 4.5 | 1.71 | 0.94 | 0.25 | |
| 5.0 | 1.52 | 0.86 | 0.26 | |
| 5.5 | 1.40 | 0.86 | 0.25 | |
| 6.0 | 1.28 | 0.79 | 0.26 | |
| V3-14 | 3.0 | 2.58 | 1.15 | 0.30 |
| 3.5 | 2.73 | 1.23 | 0.32 | |
| 4.0 | 2.50 | 1.27 | 0.31 | |
| 4.5 | 2.29 | 1.30 | 0.32 | |
| 5.0 | 2.05 | 1.20 | 0.33 | |
| 5.5 | 1.90 | 1.10 | 0.33 | |
| 6.0 | 1.74 | 1.01 | 0.33 | |
| V4-15 | 3.0 | 3.17 | 1.37 | 0.35 |
| 3.5 | 3.26 | 1.43 | 0.35 | |
| 4.0 | 3.06 | 1.50 | 0.35 | |
| 4.5 | 2.86 | 1.54 | 0.37 | |
| 5.0 | 2.51 | 1.42 | 0.37 | |
| 5.5 | 2.30 | 1.30 | 0.37 | |
| 6.0 | 2.13 | 1.20 | 0.38 |
Peak power per actuator: 5,5kW
Notice:
This depends on many factors, including the boat’s roll period, the size of the stabilizer system for the boat, and the sea state.
When designing the power supply system, it must be able to deliver enough power for both the stabilizer system and any other connected equipment that will be operating at the same time at their maximum power draw.
Additionally, the system must handle rapid power changes from the stabilizers, which go from zero to full power twice during each roll cycle of the boat.
Once the total peak power demand is known, use the boat’s roll period and choose a typical operating scenario (e.g. large waves, medium waves, or calm conditions). Typically, small to medium waves are the most common conditions to anchor comfortably in. Then decide how long the system should run from the battery bank without running a generator.
This information allows the power system supplier to calculate the required battery capacity (in amp-hours), battery technology and charging capacity. A safety margin should be included to account for battery aging and reduced performance over time.
Note that the above listed values is for a specific sea state scenario running both actuators constantly at the stated load. Actual consumption will change according to the change in sea state such as wave height, length and frequency. These values are therefore to be considered as guidelines only.
Related products
-

Hydraulic actuator kit for Vector fins VFS1950 for alu/steel hulls
Call 954-577-2850 or Send Enquiry for Pricing More Info -

Vector Fins™ pair – for SPS100E Electric actuator
Call 954-577-2850 or Send Enquiry for Pricing More Info -

Hyd powerpack for SPS55B
Call 954-577-2850 or Send Enquiry for Pricing More Info -
Vector Fins™ pair – V4-21 for SPS70E
Call 954-577-2850 or Send Enquiry for Pricing More Info